Microscopic imager (MI) (с англ. — «микрокамера; камера для микросъёмки») — монохромная электронная камера, предназначенная для макросъёмки марсианской поверхности. Устанавливалась на «Спирите» и «Оппортьюнити» — марсоходах миссии Mars Exploration Rover.

Обзор и устройство
правитьMI предназначена для получения изображений с пространственным разрешением 30 микрон/пиксель в широком спектральном диапазоне (400—700 нм)[1]. Технически MI не является микроскопом: она имеет фиксированное увеличение 0,4 и предназначена для получения изображений, имитирующих вид, который геолог получил бы через обычную ручную лупу[1]. На языке фотографов система MI использует «макро» объектив. MI использует такой же дизайн электроники, как и другие камеры марсоходов миссии MER, но имеет оптику, которая дает поле зрения 31,5 × 31,5 мкм. MI состоит из двух частей: блока электроники и детекторной головки, которая включает в себя оптическую часть и ПЗС-матрицу[2]. Два блока соединяются эластичным шлейфом. В связи с тем, что блок электроники находится вне марсохода, то он содержит нагревающийся резистор, который обогревает электронику до минимальной рабочей температуры в −55 °C. Камера имеет светосилу f/15 ± 0,75 и фокусное расстояние 20,2 мм с полем зрения 31,5 × 31,5 мкм по горизонтали/вертикали (44,5 мм по диагонали)[2]. В MI применяется ПЗС-матрица с разрешением 1024 × 2048 фирмы Mitel. Чип разделен на две части: одна часть размером 1024×1024 чувствительна к свету и непосредственно создаёт изображения, а вторая часть размером 1024 × 1024 принимает эти данные для хранения/считывания. Чтобы не быть чувствительной к свету она закрыта чёрным алюминиевым экраном[2]. Лучшее для съёмок фокусное расстояние достигается на дистанции в 69 мм. Пространственное разрешение или мгновенный угол поля зрения (IFOV) составляет 30 ± 1,5 мкм/пиксель. Угловое разрешение в центре поля зрения составляет 0,42 мрад/пиксель[2]. Для наведения MI используется контактный датчик. Поскольку MI имеет относительно небольшую глубину резкости (± 3 мм), то изображение шероховатой или выпуклой поверхности будут содержать как сфокусированные, так и несфокусированные участки[1]. Для обеспечения хорошего качества и фокуса, съёмка поверхности производится с различных расстояний. Далее, объединив этот набор изображений, получается полностью сфокусированные изображение. Каждое изображение MI сопровождается данными о положении и ориентации камеры[1]. Оптика MI защищается от марсианской окружающей среды с помощью убирающейся пылезащитной крышки[1]. Защитная крышка включает в себя каптоновое окно, которое окрашено в оранжевый цвет для ограничения спектрального полосового диапазона до 500—700 нм, позволяя получать информацию о цвете, принимая изображения с открытой и закрытой защитной крышкой. MI работает в паре с инструментом Rock Abrasion Tool (RAT). Для уменьшения объёма занимаемого пространства изображения проходят процедуру сжатия, что также очень важно вследствие высокой задержки сигнала и низкой пропускной способности средств связи для передачи на Землю. Блок электроники имеет размеры 67 × 69 × 34 мм, а детекторная головка 41 × 51 × 15 мм. Камера весит 210 грамм и потребляет около 2,15 Вт энергии без учёта обогревателя.
MI расположена на манипуляторе марсоходов MER, вместе с другими научными инструментами — шлифовальной установкой Rock Abrasion Tool, спектрометрами MIMOS II и APXS.
- Галерея
-
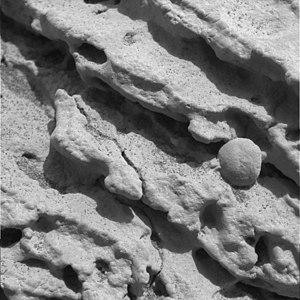
 Известный снимок гематитовых шариков, получивших прозвище «черника», которые, как предполагается, образовались в контакте с жидкой водой. Снимок сделан камерой MI марсохода «Оппортьюнити» в кратере Игл на плато Меридиана
Известный снимок гематитовых шариков, получивших прозвище «черника», которые, как предполагается, образовались в контакте с жидкой водой. Снимок сделан камерой MI марсохода «Оппортьюнити» в кратере Игл на плато Меридиана -
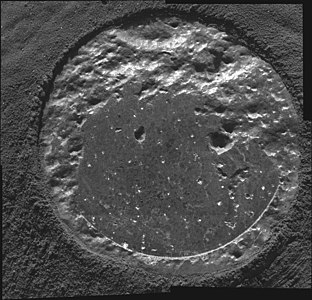 Мозаичное изображение поверхности камня после шлифования инструментом Rock Abrasion Tool марсохода «Спирит»
Мозаичное изображение поверхности камня после шлифования инструментом Rock Abrasion Tool марсохода «Спирит» -
 Анимация съёмки марсианской поверхности с различной дистанции
Анимация съёмки марсианской поверхности с различной дистанции -
 Марсианская поверхность в кратере Гусева
Марсианская поверхность в кратере Гусева -
 Поверхность камня «горшок с золотом» крупным планом
Поверхность камня «горшок с золотом» крупным планом -
 Поверхность обнажения горных пород
Поверхность обнажения горных пород -
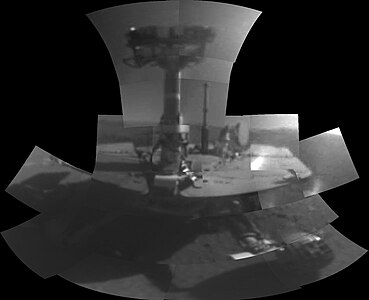 Первый и последний автопортрет марсохода «Оппортьюнити» на Марсе, выполненный при помощи микрокамеры MI (14-20 февраля 2018 года/4998-5004 сол)
Первый и последний автопортрет марсохода «Оппортьюнити» на Марсе, выполненный при помощи микрокамеры MI (14-20 февраля 2018 года/4998-5004 сол) -
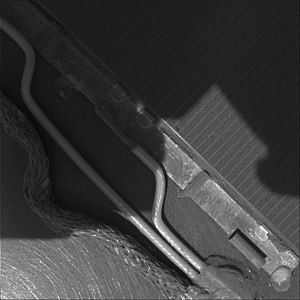 Пыль, покрывающая солнечные батареи марсохода «Спирит»
Пыль, покрывающая солнечные батареи марсохода «Спирит»









См. также
правитьПримечания
править- ↑ 1 2 3 4 5 K. E. Herkenhoff, S. W. Squyres, J. F. Bell III, J. N. Maki, H. M. Arneson, D. I. Brown, S. A. Collins, A. Dingizian, S. T. Elliot, W. Goetz, E. C. Hagerott, A. G. Hayes, M. J. Johnson, R. L. Kirk, M. B. Madsen, R. V. Morris, L. M. Scherr, M. A. Schwochert, L. R. Shiraishi, G. H. Smith, L. A. Soderblom, J. N. Sohl-Dickstein, M. V. Wadsworth. THE ATHENA MICROSCOPIC IMAGER INVESTIGATION // Sixth International Conference on Mars (2003). — 2003. Архивировано 10 апреля 2021 года.
- ↑ 1 2 3 4 J. N. Maki, J. F. Bell III, K. E. Herkenhoff, S. W. Squyres, A. Kiely, M. Klimesh, M. Schwochert, T. Litwin, R. Willson, A. Johnson, M. Maimone, E. Baumgartner, A. Collins, M. Wadsworth, S. T. Elliot, A. Dingizian, D. Brown, E. C. Hagerott, L. Scherr, R. Deen, D. Alexander, J. Lorre. Mars Exploration Rover Engineering Cameras // JOURNAL OF GEOPHYSICAL RESEARCH. — 2003. — Vol. 108. — P. 24. — doi:10.1029/2003JE002077. Архивировано 6 августа 2018 года.